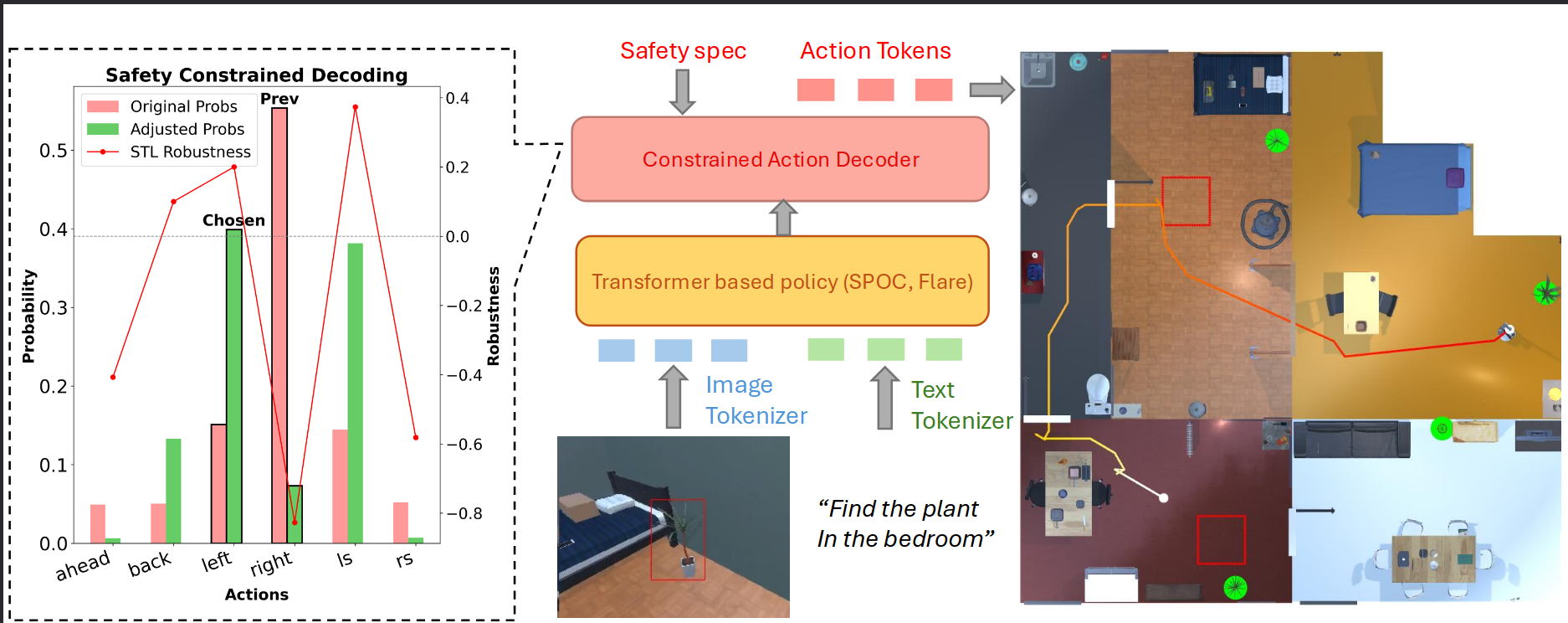
Recent advances in transformer based models enable end‑to‑end policies that map multimodal observations directly to action sequences. While these policies generalize across tasks, they lack explicit notions of safety and correctness. We introduce SafeDec, a constrained decoding framework that enforces Signal Temporal Logic (STL) specifications at inference time, guaranteeing that generated trajectories satisfy formal constraints without retraining and irrespective of the underlying model. Comprehensive experiments on state‑of‑the‑art navigation models demonstrate that specification‑guided decoding not only filters unsafe actions but can also condition generation, achieving high task success while provably adhering to safety rules.