


Evaluated on the SafetyChores benchmark with fragile-object and dangerous-object specifications. Cost is the safety violation metric (lower is better); SR is task success rate (higher is better).
SafeDec
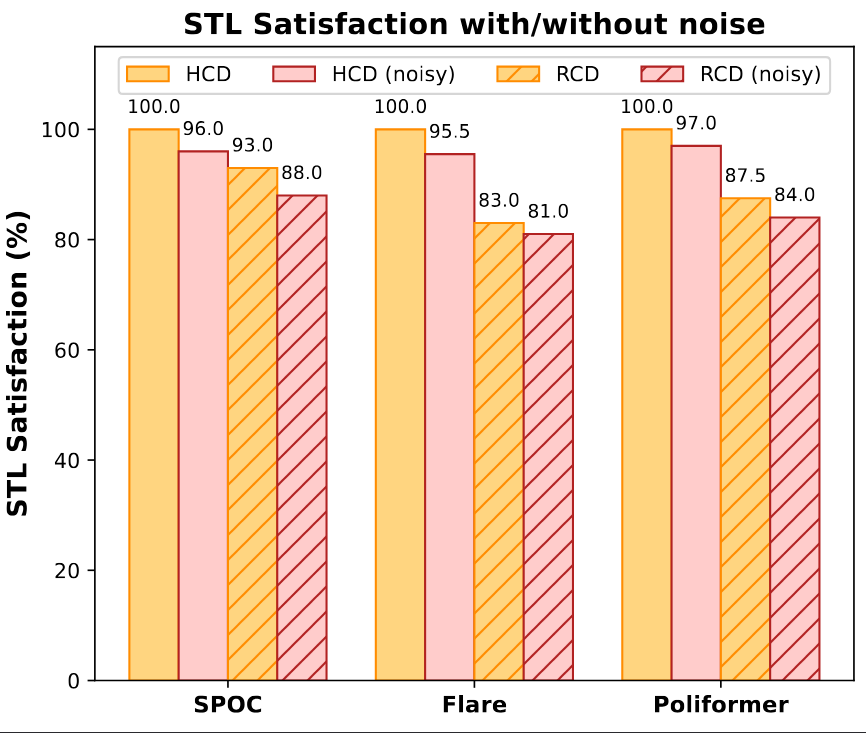
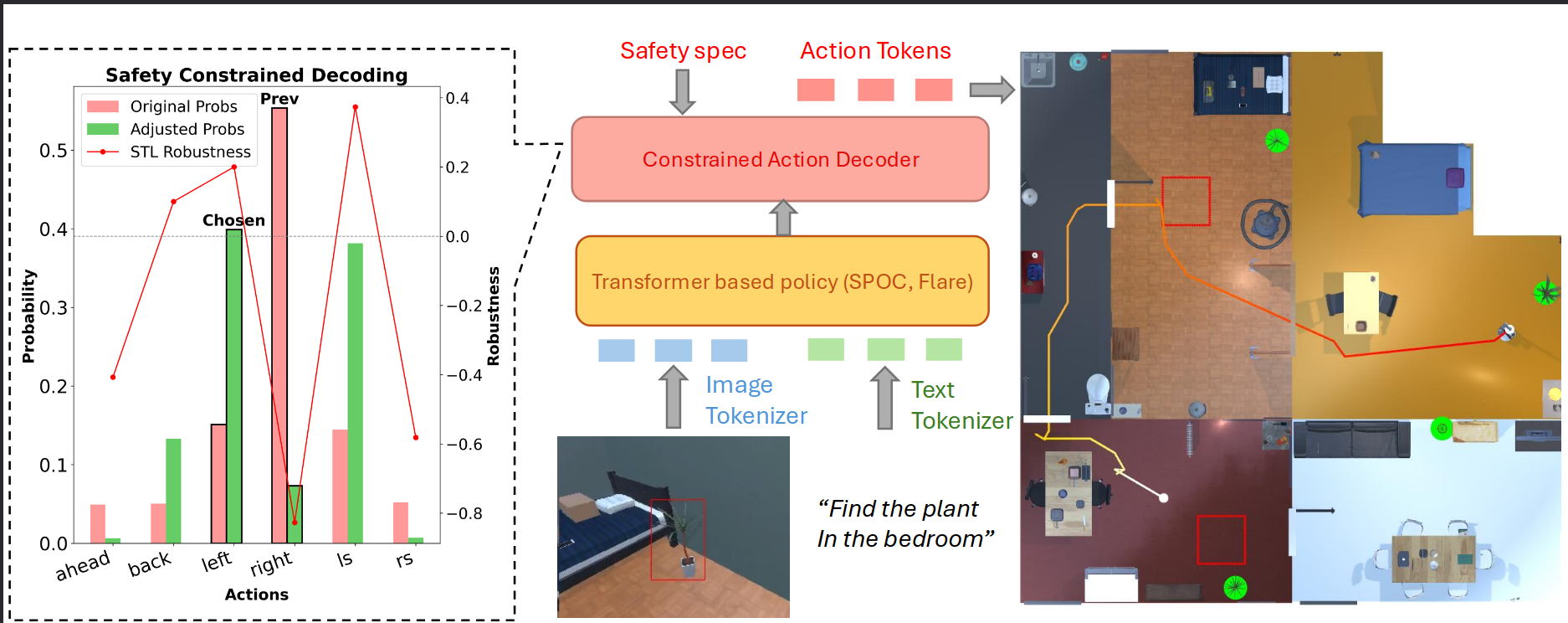
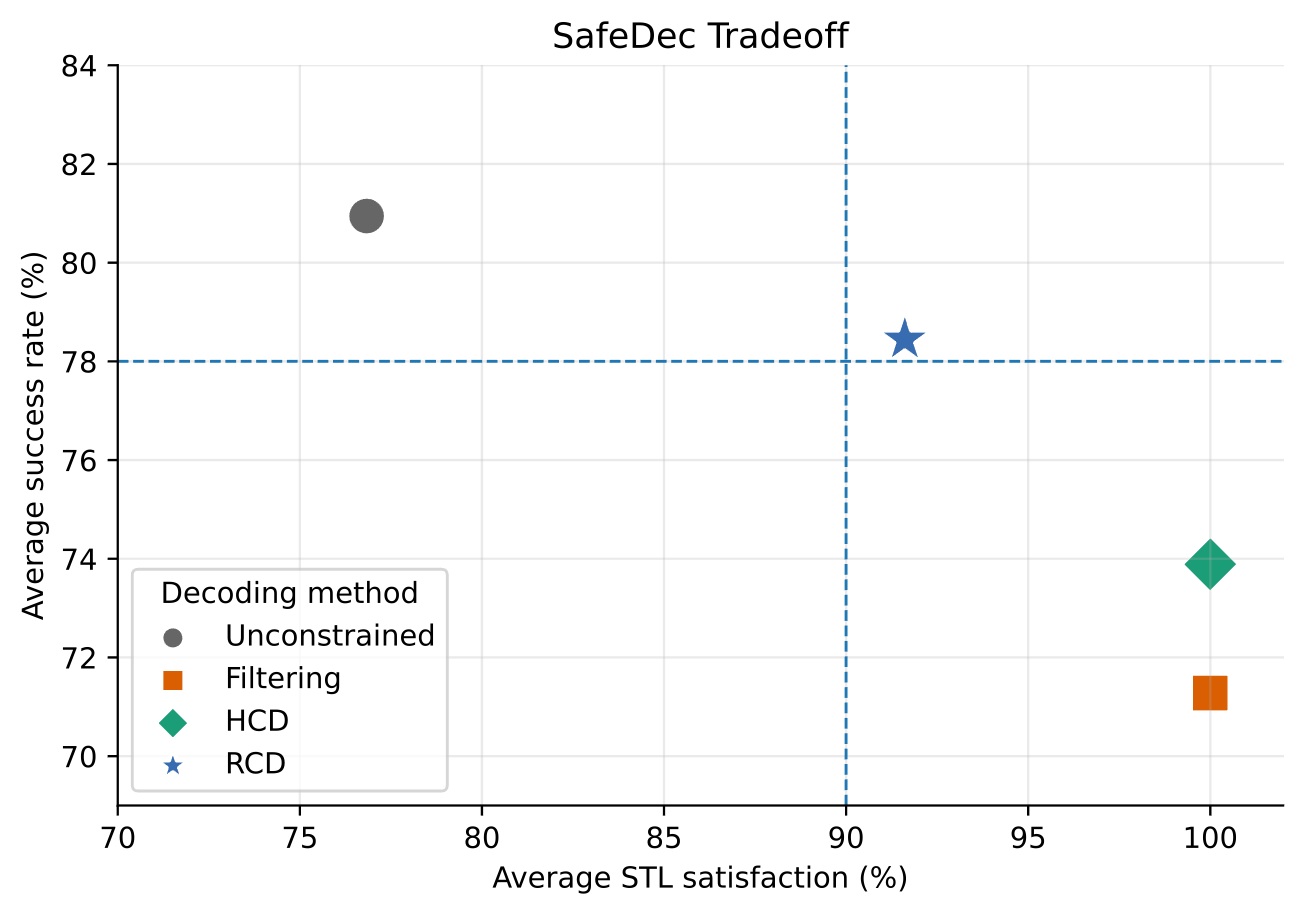
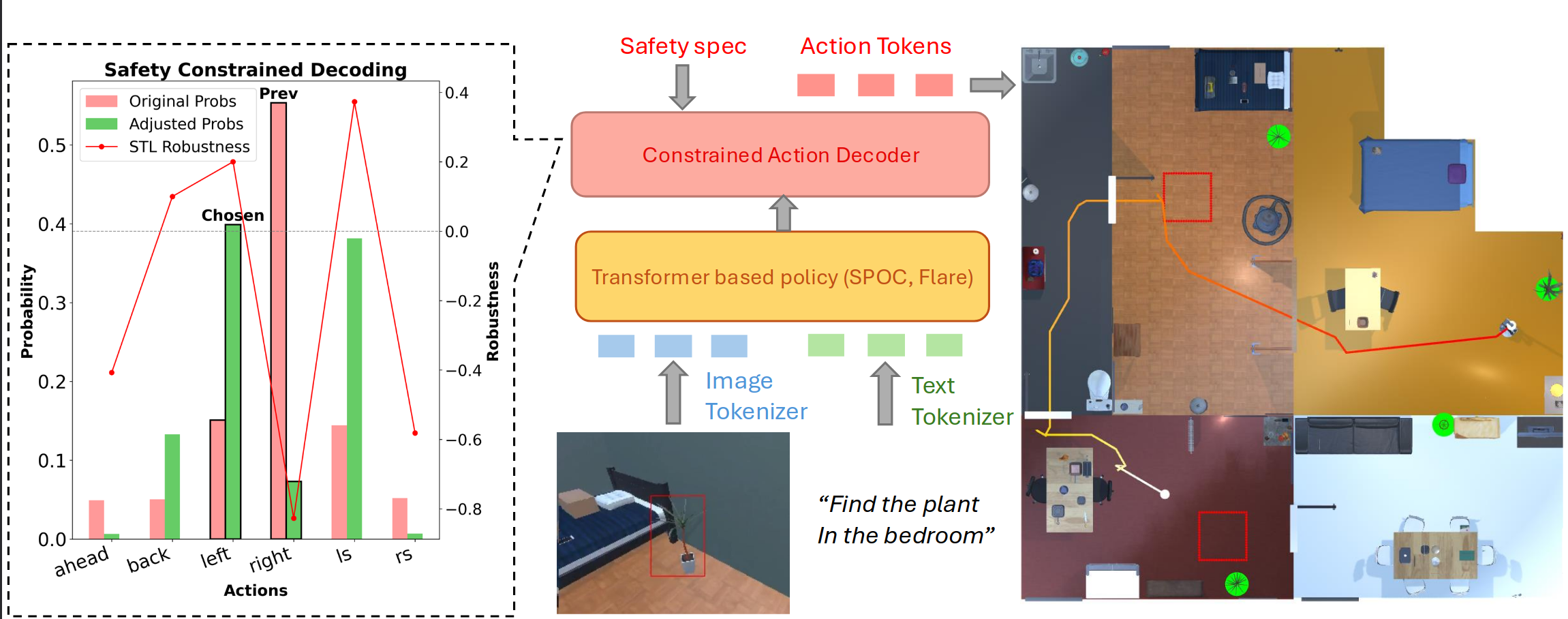
We take the constrained-decoding principle and apply it to enforce safety specifications over state trajectories. Safety rules are captured by Signal Temporal Logic (STL), a language defined over continuous signals from dynamical systems. SafeDec simulates candidate actions with an approximate dynamics model and evaluates STL satisfaction in real time, directly inside the decoding loop.
Hard Constrained Decoding (HCD)
If a candidate action's predicted next state would violate the STL spec φ, set its logit to −∞ (zero probability) before softmax. This yields provable compliance under the assumed dynamics model.
Robustness Constrained Decoding (RCD)
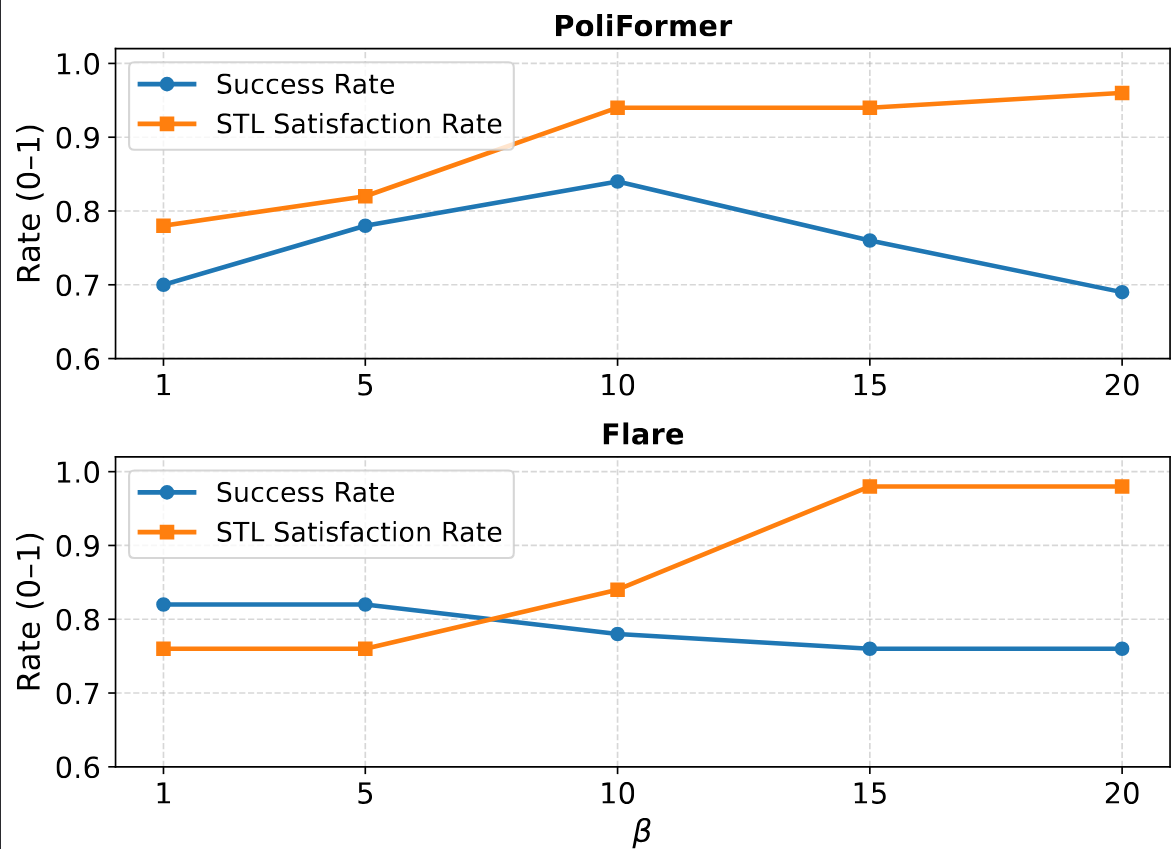
Compute the STL robustness score ρ for each candidate's predicted successor state and convert it to a weight that boosts safer actions and suppresses risky ones (tunable via β). Preserves task performance while greatly reducing violations.
SafeDec is model-agnostic: it only needs (1) access to decoder logits and (2) an approximate dynamics function. STL evaluation is done efficiently via STLCG++ for real-time inference.